Controllare un Servo Motore tramite Joystick
Obiettivo: Come controllare due servomotori utilizzando un Joystick per Arduino.
Pre-requisiti
Componenti elettronici:
- Arduino UNO
- Breadboard
- 2 Servomotori
- 1 Joystick KY-023K
Teoria: Il Joystick è una dispositivo elettronico che trasforma i movimenti di una leva manovrata dall’utente in una serie di segnali elettrici, questi segnali possono essere in seguito utilizzati per controllare un software (e.g., videogame), un’apparecchiatura o un attuatore meccanico. Possono esistere due differenti tipologie di Joystick:
- Joystick Digitale: Rileva solamente la direzione dell’inclinazione della leva.
- Joystick Analogico: Rileva anche l’ampiezza dell’inclinazione.
Nello specifico in questo articolo viene illustrato il funzionamento di uno dei controller più tipicamente utilizzati e presenti nei vari kit Arduino: il “Dual Axis Joystick Module KY-023“, Questo dispositivo, basato sul controller della PlayStation2, utilizza due potenziometri bi-assiali per controllare l’asse X e l’asse Y. Inoltre è possibile premere il controller per attivare uno switch. Nello specifico, la tensione di funzionamento del dispositivo è compresa nel range 3.3 – 5 V. Mentre le dimensioni sono pari a 2.6 x 3.4 cm.
Nella tabella a seguire è riportata la piedinatura utile per collegare in modo corretto il Joystick KY-023.
| KY-023 PIN | Descrizione |
| GND | Ground |
| +5V | Alimentazione Vcc |
| VRx | Uscita Analogica (Asse X) |
| VRy | Uscita Analogica (Asse Y) |
| SW | Switch |
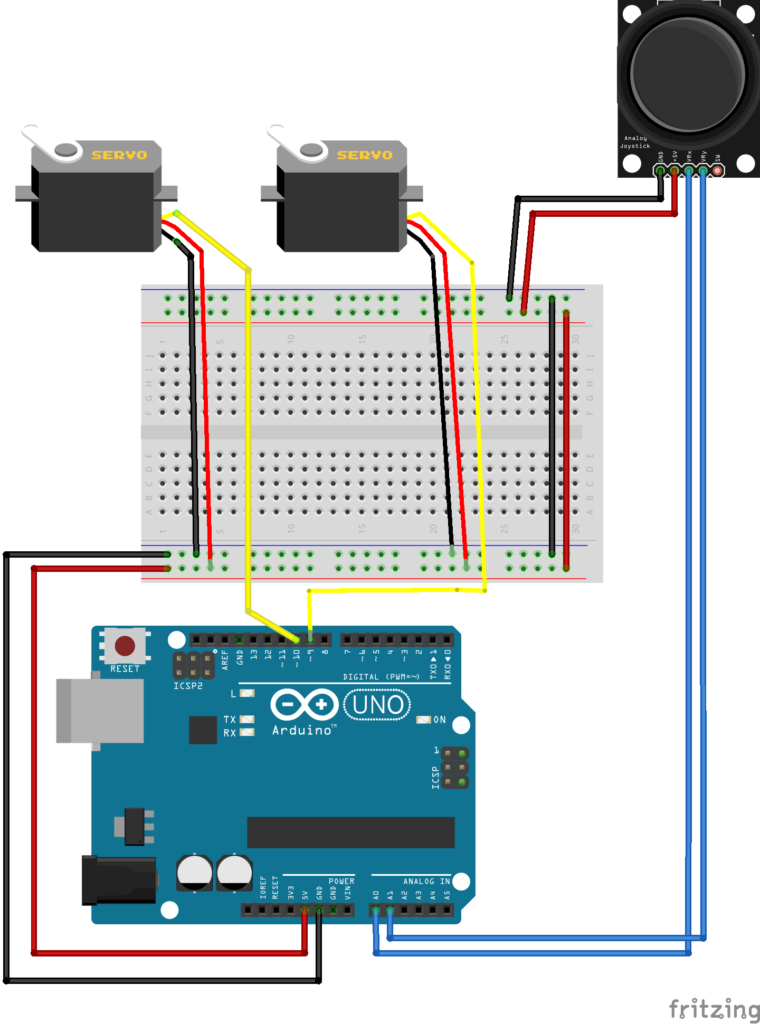
In questo articolo il Joystick viene utilizzato per comandare due differenti servomotori. Un servo è associato all’asse X ed un altro è invece associato all’asse Y. La posizione di riposo dei due servomotori è per entrambi 90 gradi. Spostando il Joystick lungo l’asse X si può modificare la posizione del servo associato all’asse X di un angolo variabile da 0 a 180 gradi. Lo stesso accade modificando la posizione del joystick lungo l’asse y.
Collegamento Circuitale:
Codice: