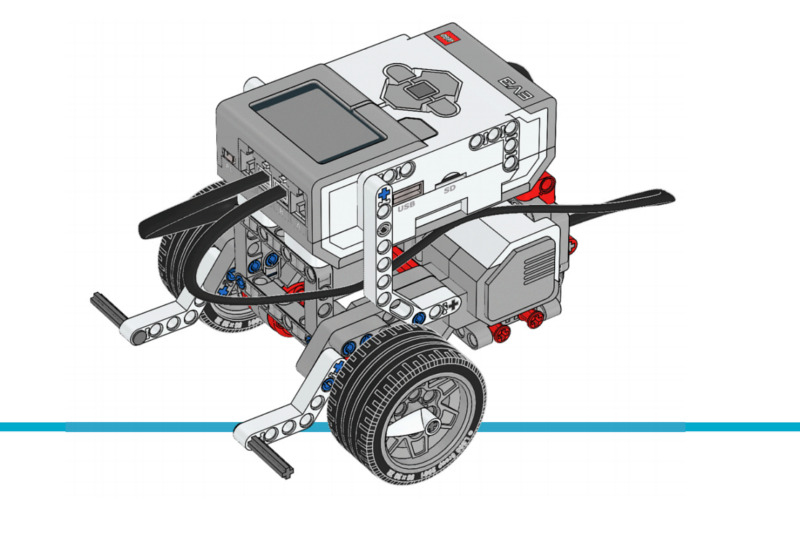
Robot EV3 Mindstorm – Come far curvare un Robot (Driving Base)
Obiettivo: Imparare ad utilizzare i servomotori del Kit EV3 Mindstorm al fine di eseguire traiettorie curve.
Teoria:
I contenuti teorici riportati in questa lezione sono relativi al robot Driving Base EV3. Questo robot è costituito da due servomotori, che permettono di controllare le due ruote, ed una ruota a sfera.
I servomotori presenti nel kit EV3 Minstrom presentano le seguenti caratteristiche:
- Contagiri con precisione di un grado
- 160/170 giri al minuto
- Coppia motrice 20 N/cm
- Coppia massima 40 N/cm

La modalità di connessione è rapida, è sufficiente connettere i servomotori attraverso l’utilizzo dei cavi al mattoncini EV3 utilizzando le porte di uscita (A, B, C, D). Attraverso la programmazione del mattoncini sarà possibile selezionare la porta impiegata e programmare in modo corretto il servomotore regolando velocità di rotazione e tempo di accensione.
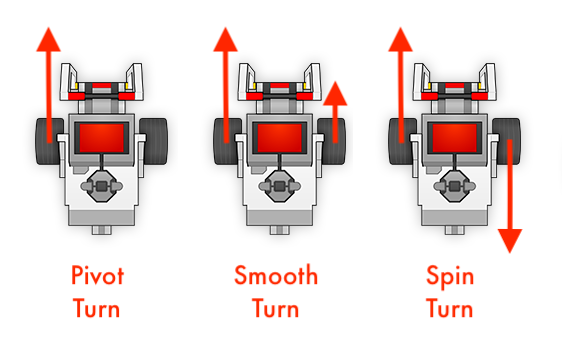
Regolando la velocità di rotazione dei entrambi i servomotori è possibile impostare 3 differenti modalità di curva:
- Pivot Turn: una ruota ferma ed una ruota in movimento. In questo caso il robot gira intorno alla ruota ferma, la quale funge da perno. La velocità di rotazione dipende dalla ruota in movimento.
- Smooth Turn: le ruote si muovono entrambe nella stessa direzione ma a velocità differente. In questo caso il robot tende a curvare nella direzione della ruota che si muove più lentamente.
- Spin Turn: le due ruote si muovo alla stessa velocità ma in direzioni differenti. In questo caso il robot ruota su se stesso. La velocità di rotazione dipende dalla velocità delle due ruote.
Codice:
Viene in seguito riportato il codice (schema a blocchi) utilizzato per effettuare le tre differenti tipologie di rotazione.
E’ importante considerare che attraverso il programma è possibile regolare la velocità di rotazione di ogni singola ruota ed il tempo di rotazione espresso in: secondi, rotazioni, gradi.
Si potrebbe pensare che attraverso il codice sia possibile definire immediatamente la tipologia di curva desiderata (ad esempio una curva a gomito a 90 gradi), d’altro canto questo non è possibile poiché lo stesso tempo e la stessa velocità di rotazione posso avere effetti differenti su robot differenti.
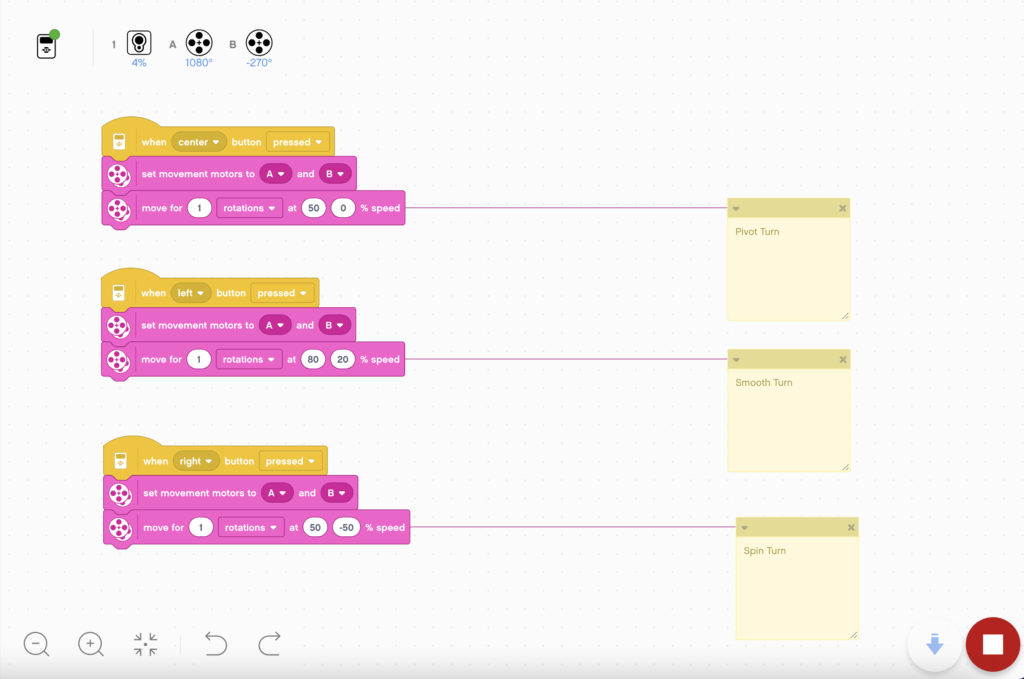
- Pivot Turn: il programma si avvia quando viene premuto il tasto centrale sul robot. Le ruote effettuano una sola rotazione. Il motore della ruota A è impostato ad una velocità pari al 50% mentre la velocità della ruota B è impostata allo 0%.
- Smooth Turn: il programma si avvia quando viene premuto il tasto sinistro sul robot. Le ruote effettuano una sola rotazione. Il motore della ruota A è impostato ad una velocità pari al 80% mentre la velocità della ruota B è impostata allo 20%.
- Spin Turn: il programma si avvia quando viene premuto il tasto sinistro sul robot. Le ruote effettuano una sola rotazione. Il motore della ruota A è impostato ad una velocità pari al 50% mentre la velocità della ruota B è impostata a -50%.