Teoria: Il Servomotore è uno particolare tipo motore ampiamente utilizzato sia in contesti industriali sia nell’ambito del modellismo. Nel dettaglio, il servomotore è impiegato in tutte le applicazioni che prevedono il controllo della posizione di in motore in corrente continua ed il raggiungimento di un determinato angolo in modo preciso indipendentemente dalla posizione iniziale. Le caratteristiche principali del servomotore sono:
Tensione di alimentazione
Coppia Massima (espressa in Kg)
Angolo di rotazione
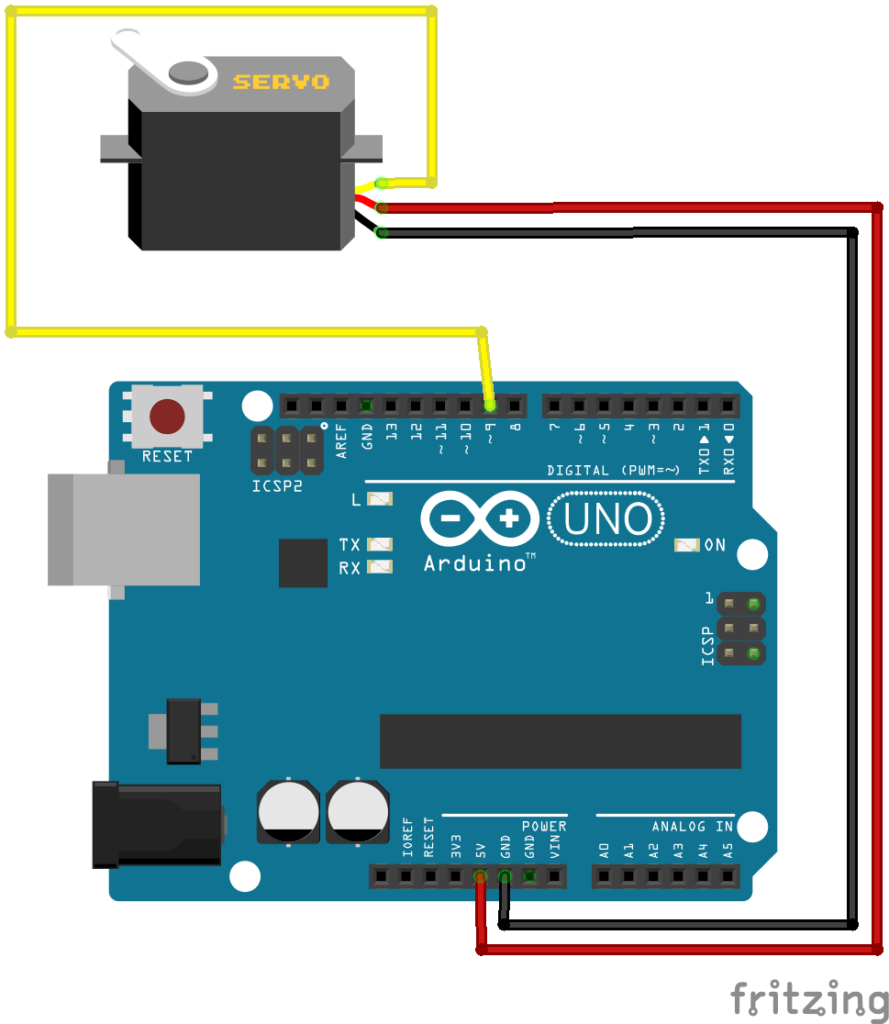
I servomotori sono caratterizzati da tre cavi che devono essere opportunamente collegati ad Arduino:
Il cavo di alimentazione positiva (+)
Il ground (-)
Il controllo
Collegamento Circuitale:
Collegamento Circuitale
Codice:
Personalizzazioni: E’ possibile modificare la velocità e l’angolo di rotazione del servomotore intervenendo direttamente sulle variabili in gioco.
Azionare un Motore a CC con il Transistor
Obiettivo: Azionare un motore a corrente continua tramite transistor
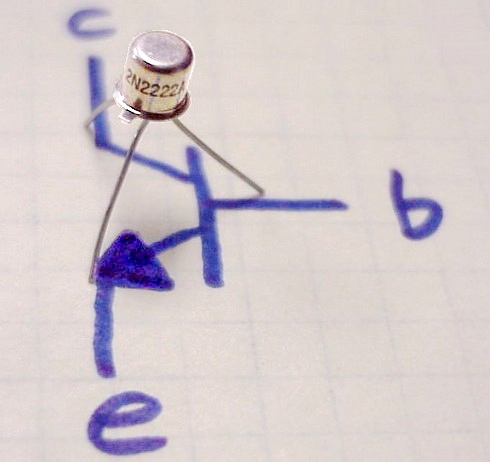
Teoria: Il Transistor è un elemento elettronico utilizzato come amplificatore di corrente o interruttore. E’ costruito da tre strati di materiale semiconduttori uniti con una doppia giunzione p-n, tipica dei diodi. Ad ogni strato è collegato un terminale: quello centrale si chiama Base, e quelli esterni Emettitore e Collettore. Il principio di funzionamento è basato sulla possibilità di controllare il passaggio di corrente tra collettore ed emettitore, tramite un impulso elettrico fornito alla base.
Esistono due tipologie di transistor, a seconda di come sono costruiti: Transistor PNP e NPN; l’unica differenza funzionale tra un transistor PNP e un transistor NPN è la polarità delle giunzioni durante il funzionamento
Tramite i transistor è possibile controllare attuatori che necessitano di grandi correnti, utilizzando una piccola tensione sulla base. In pratica basta collegare un ramo della corrente (ad esempio la terra) sul collettore e sull’emettitore del transistor e gestire il collegamento tramite la base.
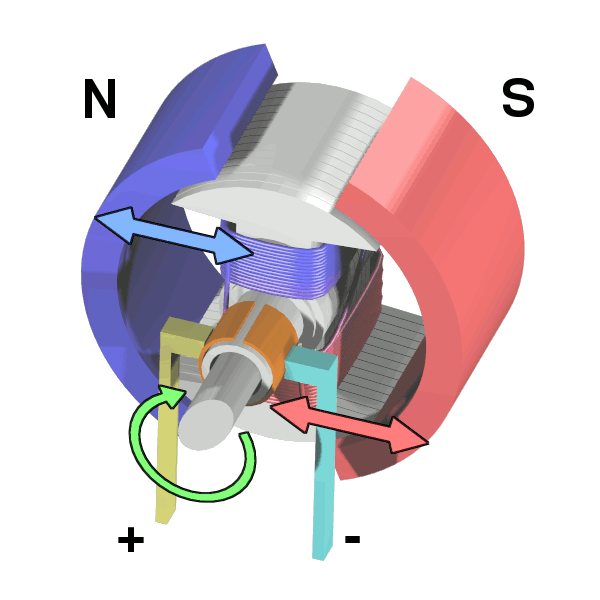
Motori a Corrente Continua (DC): sono costituiti, al loro interno, da un magnete permanente e da un’elettrocalamita che viene alimentata da dei contatti striscianti, che, per come sono montanti, invertono la tonalità dell’elettrocalamita ad ogni mezzo giro, mantenendo in rotazione l’asse.
Collegamento Circuitale:
Codice:
Personalizzazioni: E’ possibile collegare un sensore di temperatura per far attivare il motore quando l’ambiente si surriscalda.
Come Collegare un Display LCD ad Arduino
Obiettivo: Utilizzare un Display LCD 16×2 (basato su un Driver Hitachi HD44780).
Componenti elettronici:
Arduino UNO
Breadboard
1 Display LCD (e.g., 1602A) compatibile con Driver Hitachi HD44780
1 Potenziometro da 10 kOhm
1 Resistenza da 220 Ohm
Teoria: I display basati su Driver Hitachi HD44780 sono tra i più diffusi in ambito embedded. Caratterizzati da differenti formati (i.e., 8×1, 8×2, 16×2, 20×2, 16×3, etc), questi display permettono di visualizzare solo caratteri. Nella seguente tabella si riporta la descrizione dei PIN del dispositivo:
PIN
Descrizione
1
Vss (Massa)
2
Vcc (Genericamente 5 V)
3
Vee (Controllo contrasto, collegato in genere ad un potenziometrocon tensione che varia da 0 a 5v)
4
R/S (0 per selezionare l’invio di un comando, 1 per i dati)
5
R/W (0 per selezionare la scrittura di dati o comandi, 1 per la lettura dei dati o dello stato)
6
E (inizia il ciclo di scrittura o lettura, secondo R/S e R/W)
7
D0 (Bus dati)
8
D1 (Bus dati)
9
D2 (Bus dati)
10
D3 (Bus dati)
11
D4 (Bus dati)
12
D5 (Bus dati)
13
D6 (Bus dati)
14
D7 (Bus dati)
15
A (Vcc retroilluminazione, se presente)
16
K (Vss retroilluminazione, se presente)
Il Driver HD44780 si basa su una modalità di trasferimento dati di tipo parallelo. Nel dettaglio è supportato sia il trasferimento di 8 bit (l’intero comando D0-D7) sia il trasferimento di 4 bit (D4-D7). Nel secondo caso, per trasmettere un byte vengono effettuati due trasferimenti.
Per la scrittura di un singolo carattere è necessario rispettare il seguente “protocollo di trasmissione“:
Posizionare il cursore nella posizione desiderata
Impostare a 1 il pin R/S e a 0 il pin R/W
Inviare il codice ASCII del carattere
Impostare ad 1 il pin E per un minimo di 450 nanosecondi ed, in seguito, riportarlo a 0
Da un punto di vista pratico, grazie all’impiego della specifica libreriaLiquidCrystal inclusa nel pacchetto software di Arduino è possibile pilotare il display semplificando notevolmente la parte di gestione dei pin, dei comandi e delle relative temporizzazioni. La libreria mette infatti a disposizione una classe LiquidCrystal all’interno della quale sono definite le principali funzioni necessarie per utilizzare i display basati su Driver HD44780. Quali:
Begin: Inizializza l’interfaccia del display LCD specificandone le dimensioni (larghezza ed altezza)
SetCursor: Posizione il cursore LCD ovvero la posizione nella quale verrà visualizzato il testo scritto
Print: Scrive il testo sul display LCD.
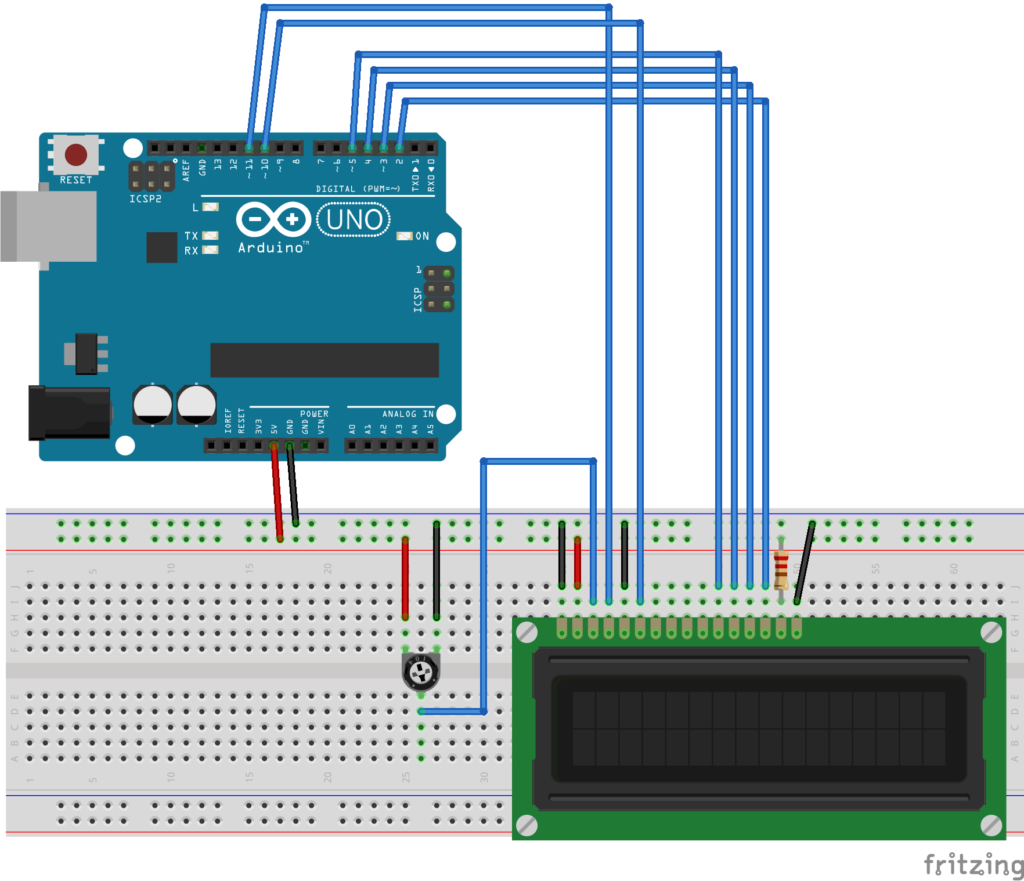
Collegamento Circuitale:
Codice:
Personalizzazioni: E’ possibile modificare il contrasto del display intervenendo sul potenziometro.
Creare funzioni con Arduino … per un Display a 7 Segmenti
Obiettivo: Creare una serie di funzioni con Arduino per utilizzare un display a 7 segmenti .
Teoria: La possibilità di riutilizzare il codice precedentemente scritto (code re-use) rappresenta una delle pratiche più comuni nella programmazione ovvero richiamare/invocare parti di codice precedentemente già sviluppate, ogni qualvolta risulta necessario, senza doverle riscrivere daccapo.
Nello specifico, questa possibilità si concretizza attraverso la scrittura di funzioni che possono essere richiamate/invocate all’interno dello stesso programma.
Queste funzioni possono svolgere diverse operazioni, che permettono di manipolare degli input dati ed eventualmente restituire degli output desiderati.
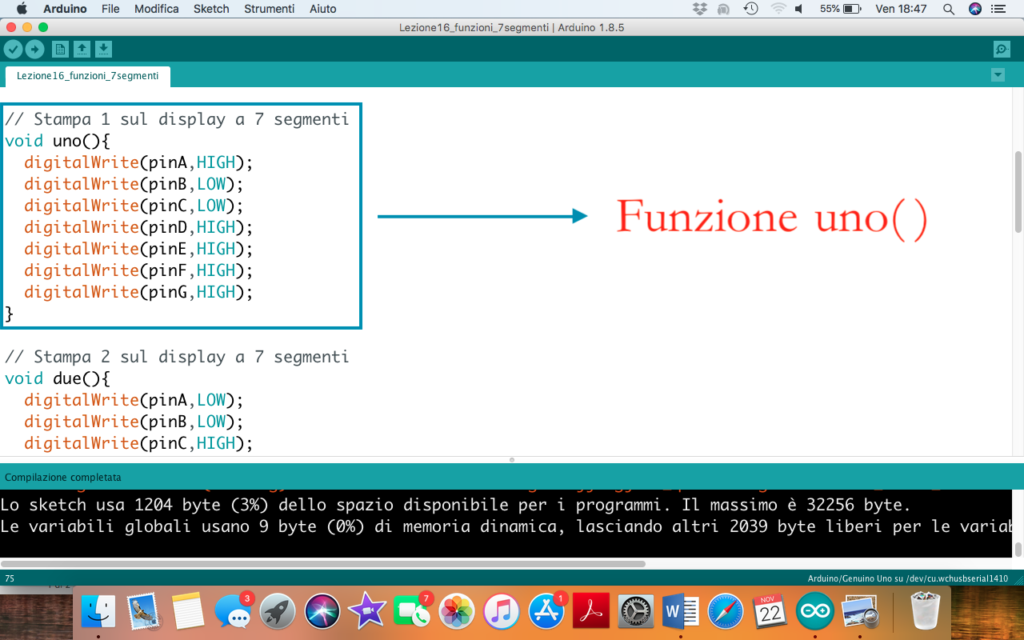
Nel caso in questione le tre funzioni implementate (denominate, uno, due e tre) non prevedono né il passaggio specifico di parametri di input né la restituzione di un output dato; queste tre funzioni svolgono solamente una serie di azioni sequenziali volte ad accendere alcuni elementi di un display a 7 segmenti. E’ importante considerare che le tre funzioni sono tutte definite prima del loro utilizzo (ovvero prima delle due funzioni principali di setup e loop).
Funzione Uno(): Stampa il carattere 1 sul display a 7 segmenti
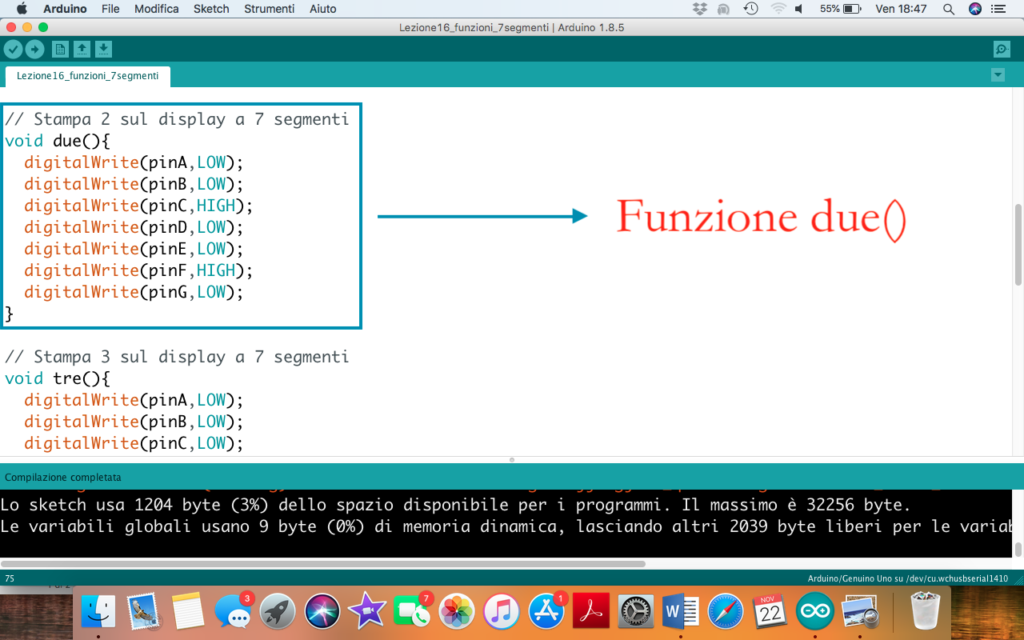
Funzione Due(): Stampa il carattere 2 sul display a 7 segmenti
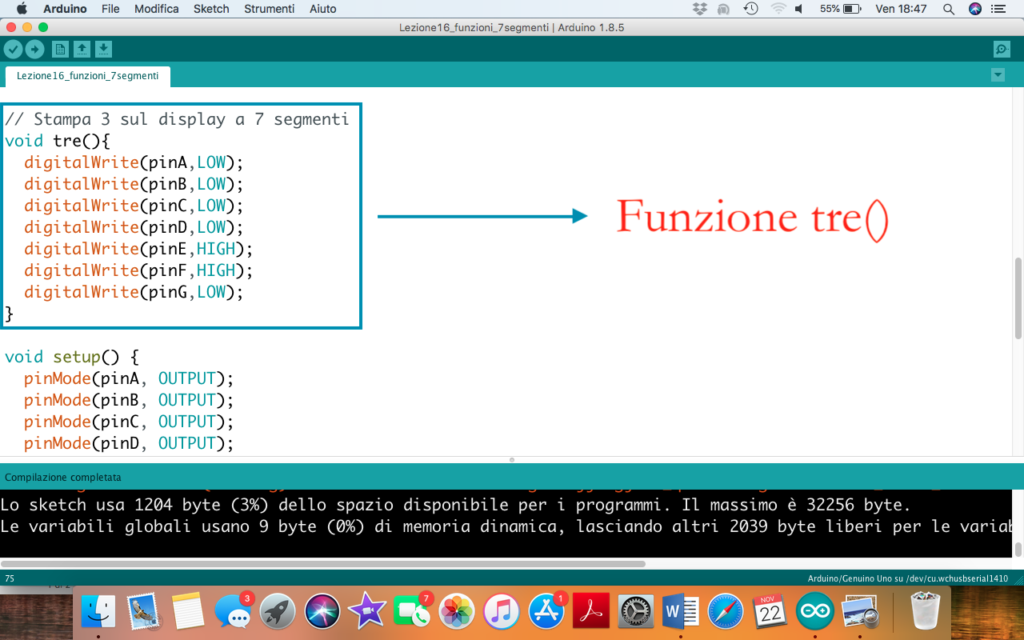
Funzione Tre(): Stampa il carattere 3 sul display a 7 segmenti
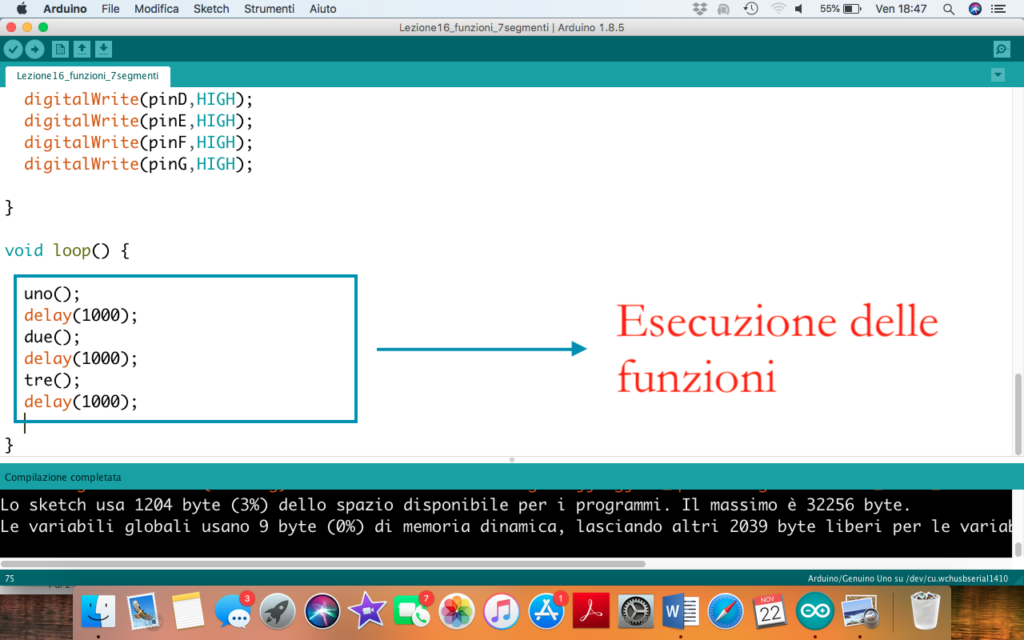
Invocazione delle Funzioni: Le funzioni possono essere invocate semplicemente richiamandole nel punto in cui devono essere eseguite. Nel caso in questione le funzioni sono richiamate all’interno del blocco loop().
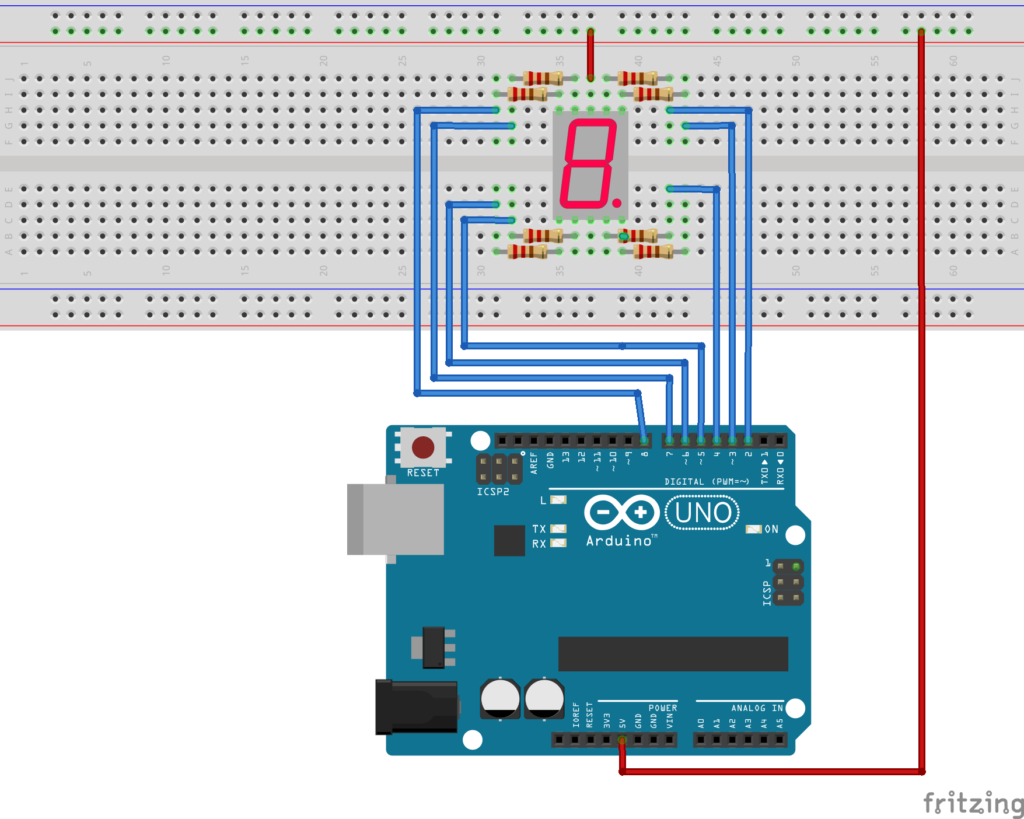
Collegamento Circuitale:
Viene in seguito riportato lo schema elettrico utilizzato per comandare un display a 7 segmenti mediante funzioni. Nel dettaglio il display impiegato è della modalità anodo comune.
Collegamento Circuitale
Codice:
Considerando l’impiego di un display ad anodo comune i singoli LED possono essere accesi mediante l’istruzione digitalWrite(pinLed,LOW);
Tre differenti funzioni sono state create per gestire il display. La funzioni sono, rispettivamente denominate, uno(), due() e tre(). Queste funzioni devono essere definite prima dei blocchi setup e loop, non prevedono l’impiego di parametri in ingresso né la restituzione di output in uscita (funzioni di tipo void).
Personalizzazioni:
E’ possibile modificare il software aggiungendo altre funzioni per la rappresentazione dei vari numeri sul display a 7 segmenti.
1..2..3.. Il Display a 7 Segmenti
Obiettivo: Utilizzo di un display a 7 segmenti .
Componenti elettronici:
Arduino UNO
Breadboard
1 Display a 7 Segmenti
7 Resistenza (100 Ohm)
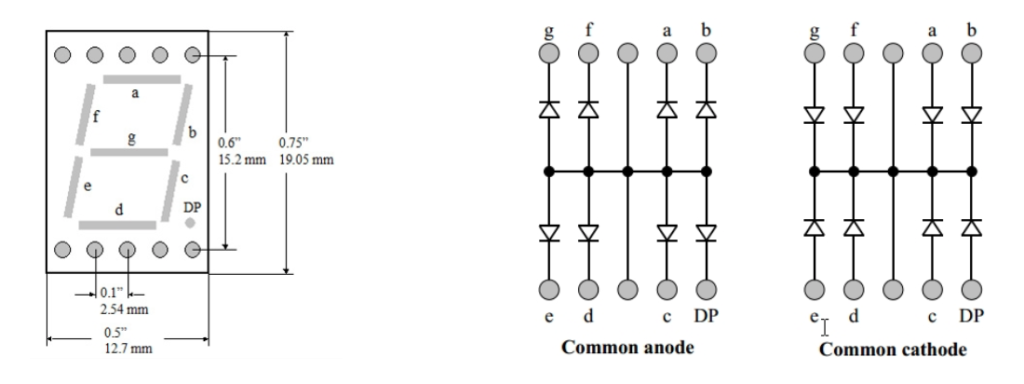
Teoria: Il display a 7 segmenti è un dispositivo elettronico in grado di visualizzare, attraverso l’accensione di combinazioni di sette differenti segmenti luminosi, le 10 cifre numeriche, alcune lettere alfabetiche e simboli grafici.
I display a 7 segmenti sono dotati di 10 differenti pin e sono così classificati:
Display 7 segmenti ad Catodo Comune: il pin centrale del LED deve essere collegato a massa (GND) mentre gli altri 8 differenti PIN sono utilizzati per comandare i 7 segmenti ed il punto DP. Nel caso in questione i singoli LED sono accesi attraverso l’istruzione Arduino digitalWrite(pinLed, HIGH);
Display 7 segmenti ad Anodo Comune: il pin centrale del LED deve essere collegato a 5V (VCC) mentre gli altri 8 differenti PIN sono utilizzati per comandare i 7 segmenti ed il punto DP. Nel caso in questione i singoli LED sono accesi attraverso l’istruzione Arduino digitalWrite(pinLed, LOW);
Collegamento Circuitale:
Viene in seguito riportato lo schema elettrico utilizzato per comandare un display a 7 segmenti. Nel dettaglio il display impiegato è della modalità anodo comune.
Collegamento Circuitale
Codice:
Considerando l’impiego di un display ad anodo comune i singoli LED possono essere accesi mediante l’istruzione digitalWrite(pinLed,LOW);
Personalizzazioni:
E’ possibile modificare il codice aggiungendo la possibilità di visualizzare altri numeri e non solo 1, 2 e 3.
Il Sensore di Presenza
Obiettivo: Utilizzare un Sensore di presenza PIR.
Componenti elettronici:
Arduino UNO
Breadboard
1 Led
1 Sensore PIR
Teoria: Il sensore ad infrarossi passivo è un dispositivo elettronico che misura i raggi infrarossi irradiati dai vari oggetti nel suo campo di vista. Per questo motivo, questo dispositivo è ampiamente utilizzato come rilevatore di movimento partendo dal presupposto che ogni persona irradia energia nello spettro dell’infrarosso. Partendo da questo presupposto è importante considerare che un sensore PIR, a differenza di un sensore ad ultrasuoni non emette onde (rileva soltanto informazioni nello spettro infrarosso), inoltre è capace di misurare una variazione dell’energia associata al movimento di un oggetto/persona.
Nel caso specifico il sensore PIR proposto nell’attività è un HC-SR501. In seguito sono riportate le principali caratteristiche tecniche di questo sensore:
Tensione di alimentazione 5-20V
Corrente assorbita 65mA
Tensione in uscita 0-3,3V
Range di sensibilità: meno di 120 gradi per 7 metri
Sono inoltre presenti due differenti trimmer per personalizzare le caratteristiche del dispositivo:
Modifica la sensibilità legata alla distanza: ruotando in senso orario la distanza aumenta fino ad un massimo di 7 metri, differentemente, ruotando in senso antiorario il potenziometro la distanza diminuisce fino ad un minimo di 3 metri.
Modifica la sensibilità legata al tempo per il quale il segnale di uscita rimane alto: ruotando in senso orario il tempo aumenta (fino ad un massimo di 5 minuti), differentemente, ruotando in senso antiorario il tempo diminuisce (fino ad un minimo di tre secondi).
Nel sensore è inoltre presente un Jumper che permette di impostare due differenti modalità di funzionamento:
H (Hold/Repeat/Retriggering): In questa posizione il sensore continuerà a mantenere il livello del segnale in uscita HIGH fintanto che il movimento continuerà ad essere percepito.
L (Intermittent or No-Repeat/Non-Retriggering): In questa posizione il sensore continuerà a mantenere il livello del segnale in uscita HIGH per il tempo definito attraverso il potenziometro.
Il sensore di presenza HC-SR501 è costituito da 3 pin. Un pin di alimentazione (5v), un pin di ground, ed il pin che riporta l’eventuale presenza di un oggetto (da collegare ad un pin di input digitale di Arduino).
Collegamento Circuitale:
Collegamento Circuitale
Codice:
A seguire viene riportato il codice necessario per l’utilizzo del sensore PIR utilizzato per realizzare il programma.
Personalizzazioni:
E’ possibile modificare il circuito introducendo un relè indispensabile per comandare una “lampada reale” e non un semplice led.
Collegare più Sensori Ultrasuoni ad Arduino
Obiettivo: Utilizzare simultaneamente due sensori a ultrasuoni (HC-SR04). Nel dettaglio, al fine di dimostrare il corretto funzionamento del circuito, ad ogni sensore è associato un led. Quando la distanza misurata dal sensore è inferiore ad una data soglia, il led associato si accende, mentre quando la distanza è superiore il led si spegne.
Componenti elettronici:
Arduino UNO
Breadboard
2 Sensori Ultrasuoni (e.g., HC-SR04)
2 Led (utilizzati per dimostrare il funzionamento del circuito)
2 Resistenze (100 Ohm) (indispensabili per il corretto funzionamento dei led)
Teoria: Il sensore di prossimità è un dispositivo che permette di rilevare la presenza di oggetti nelle immediate vicinanze, senza che vi sia un effettivo contatto. Nel caso specifico, il sensore di prossimità ad ultrasuoni sfrutta il principio del Sonar. Degli impulsi sonori (ultrasonici) vengono emessi dal dispositivo il quale attraverso l’eventuale eco di ritorno permette di rilevare la presenza di un oggetto all’interno della portata nominale. Esempi pratici di sensori ad ultrasuoni sono i sensori di retromarcia e di parcheggio utilizzati nelle moderne automobili. Nel dettaglio, le principali caratteristiche tecniche del sensore ad ultrasuoni HC-SR04 sono:
Alimentazione: +5V DC
Angolo di misura: < 30°
Distanza di rilevamento: da 2cm a 400cm
Risoluzione: 1cm
Frequenza: 40kHz
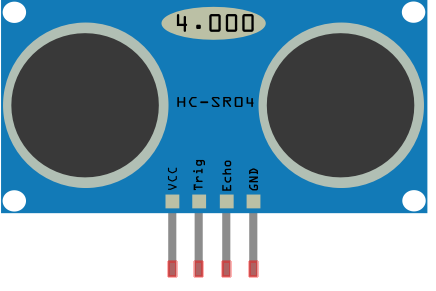
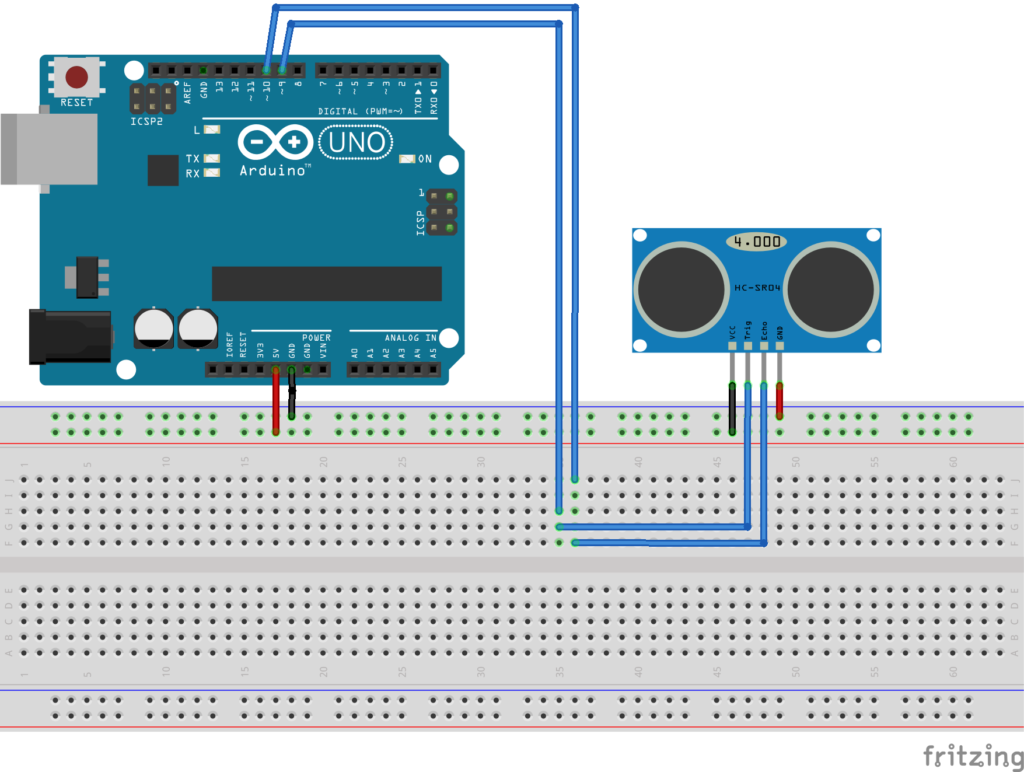
Il sensore, dispone di 4 pin: Vcc (+5V), Trigger, Echo, GND.
VCC: +5V DC
Trigger: Genera l’impulso ultrasonico
Echo: Rileva il segnale ultrasonico di ritorno
GND: 0V Ground
Modello Sensore HC-SR04
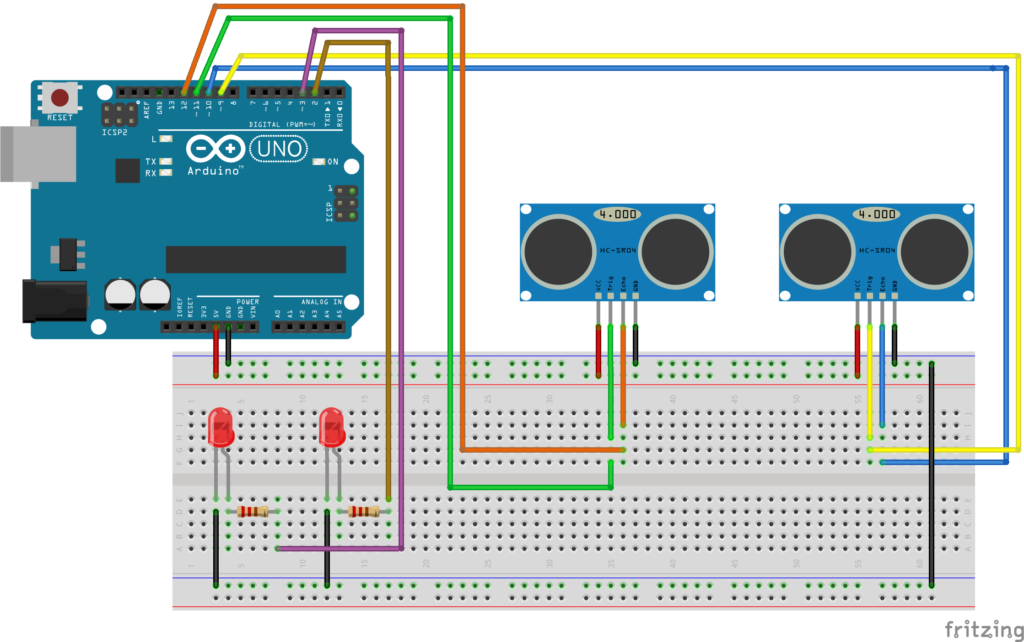
Collegamento Circuitale:
La realizzazione hardware di circuiti che utilizzano più sensori ad ultrasuoni è relativamente facile. Ognuno dei pin di Echo e di Trig del sensore deve essere semplicemente collegato ai pin di input/output di Arduino.
Collegamento Circuitale
Codice:
Nel caso specifico, in cui si vogliano utilizzare più sensori ad ultrasuoni per misurare simultaneamente la distanza in più punti è opportuno gestire i sensori in modo corretto attraverso il relativo codice. Nel dettaglio, è importante considerare che inizialmente entrambi i sensori generano l’impulso utilizzato per determinare la distanza. In seguito le letture di echo (effettuate mediante l’istruzione pulseIn) sono eseguite in modo sequenziale (una dopo l’altra).
Il Sensore a Ultrasuoni
Obiettivo: Utilizzare un Sensore a Ultrasuoni (HC-SR04) per misurare la distanza.
Componenti elettronici:
Arduino UNO
Breadboard
1 Sensore Ultrasuoni (e.g., HC-SR04)
Teoria: Il sensore di prossimità è un dispositivo che permette di rilevare la presenza di oggetti nelle immediate vicinanze, senza che vi sia un effettivo contatto. Nel caso specifico, il sensore di prossimità ad ultrasuoni sfrutta il principe del Sonar. Degli impulsi sonori (ultrasonici) vengono emessi dal dispositivo il quale attraverso l’eventuale eco di ritorno permette di rilevare la presenza di un oggetto all’interno della portata nominale. Esempi pratici di sensori ad ultrasuoni sono i sensori di retromarcia e di parcheggio utilizzati nelle moderne automobili. Nel dettaglio, le principali caratteristiche tecniche del sensore ad ultrasuoni HC-SR04 sono:
Alimentazione: +5V DC
Angolo di misura: < 30°
Distanza di rilevamento: da 2cm a 400cm
Risoluzione: 1cm
Frequenza: 40kHz
Il sensore, dispone di 4 pin: Vcc (+5V), Trigger, Echo, GND.
VCC: +5V DC
Trigger: Genera l’impulso ultrasonico
Echo: Rileva il segnale ultrasonico di ritorno
GND: 0V Ground
Modello Sensore HC-SR04
Pertanto considerando la formula che lega velocità, spazio e tempo:
s = v*t
e la velocità del suono pari a 343 m/s (che espressa in microsecondi diventa 0,0343 m/uS), si ottiene:
s = 0,0343*t
Considerando inoltre che il suono percorrerà due volte la distanza da misurare (dal sensore all’oggetto e dall’oggetto al sensore); il tempo t ottenuto deve essere diviso per due, ottenendo:
s = 0,0343*(t/2)
s = 0,01715*t
s = t/58,31
Per valutare la presenza di un oggetto è necessario rispettare il seguente “protocollo“:
Il PIN Trigger deve essere dettato alto (HIGH value) per almeno 10microsecondi.
In automatico il modulo HC-SR04 invierà 8 impulsi ultrasonici ad una frequenza pari a 40kHz.
Il PIN Echo viene posto in ascolto. Calcolando il tempo di arrivo/ritorno dell’impulso ultrasonico.
Collegamento Circuitale:
Collegamento Circuitale
Codice:
[crayon-662faae0d26b0616496217/]
Personalizzazioni: E’ possibile modificare il contrasto del display intervenendo sul potenziometro.
Le Funzioni digitalWrite, digitalRead, analogWrite e analogRead
Obiettivo: Imparare ad utilizzare le principali funzioni di Arduino
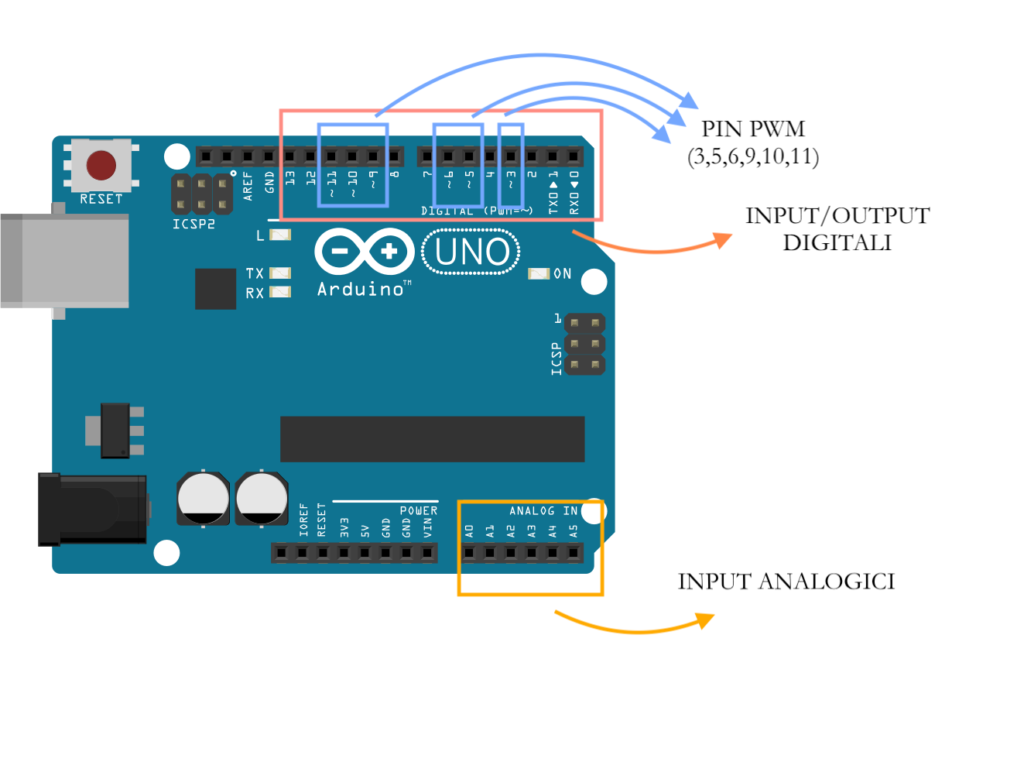
Arduino Porte (Input, Output, Digitali, Analogici)
Teoria:
Le principali funzioni utilizzate da Arduino per comunicare con il mondo esterno sono quattro e si dividono in base alla tipologia di azione:
Lettura: utilizzate per acquisire i dati dai differenti sensori (luminosità, temperatura, umidità, etc)
Scrittura: utilizzate per comandare i differenti attuatori (motori, buzzer, display, etc)
ed in base alla tipologia di segnale trattato:
Digitale: utilizzate per trattare segnali digitali che possono assumere solamente valori logici (i.e., LOW e HIGH)
Analogico: utilizzate per trattare segnali analogici con valori compresi tra 0 e 5V.
Nello specifico queste quattro funzioni sono così definite:
Codice:
digitalWrite: Funzione utilizzata per comandare attuatori mediante una logica LOW/HIGH come ad esempio motori, led o buzzer. Questa funzione prevede l’impiego di due parametri di input: il PIN (0-13) ed il VALORE (LOW/HIGH)
digitalWrite(pin, valore);
analogWrite: Funzione utilizzata per comandare attuatori mediante una logica analogica (valori compresi tra 0V e 5V) come ad esempio motori o led. Questa funzione prevede l’impiego di due parametri di input: il PIN (0-13) ed il VALORE (0-255). Nel caso specifico il valore 0 corrisponde a 0V mentre 255 a 5V. Per tutti gli altri VALORI si può attuare la proporzione lineare. (Ad esempio volendo generare un riferimento di tensione pari a 3Volt il VALORE di input può essere così calcolato: (3/5)*255. E’ importante considerare che i valori di tensione non sono “realmente” analogici ma generati attraverso la tecnica PWM. Inoltre, l’istruzione analogWrite può essere utilizzata solamente su alcuni pin digitali di output: i pin PWM (3,5,6,9,10,11).
analogWrite(pin, valore);
digitalRead: Funzione utilizzata per leggere dati da sensori basati su una logica LOW/HIGH come ad esempio i pulsanti. Questa funzione prevede l’impiego di un parametro di input: il PIN (0-13) ed un parametro di output: il VALORE (LOW/HIGH) che viene restituito dalla funzione.
valore= digitalRead(pin);
analogRead: Funzione utilizzata per leggere dati da sensori di tipo analogico (valori compresi tra 0V e 5V) come ad esempio fotoresistenze, sensori di temperatura, umidità etc. Questa funzione prevede l’impiego di un parametro di input: il PIN (A0-A5) ed un parametro di output: il VALORE (0-1023). Nel caso specifico il valore 0 corrisponde a 0V mentre 1023 a 5V. Per tutti gli altri VALORI si può attuare la proporzione lineare. (Ad esempio se viene letto il VALORE 512, la tensione di riferimento può essere così calcolata: (512/1023)*5.
valore = analogRead(pin);
Quiz:
A che valore di tensione corrisponde l'intero 818 letto attraverso la funzione analogRead
Correct!Wrong!
(818/1023)*4 = 1V
A che valore di tensione corrisponde l'intero 204 letto attraverso la funzione analogRead
Correct!Wrong!
(204/1023)*5 = 1V
A che valore di tensione corrisponde l'intero 511 letto attraverso la funzione analogRead
Correct!Wrong!
(511/1023)*5 = 2.5V
A che valore di tensione corrisponde l'intero 255 generato utilizzando la funzione analogWrite
Correct!Wrong!
(255/255)*5 = 5V
A che valore di tensione corrisponde l'intero 100 generato utilizzando la funzione analogWrite
Correct!Wrong!
(100/255)*5 = 1.96V
La funzione Valore = digitalWrite(11) è corretta?
Correct!Wrong!
La funzione digitalWrite non ha tipi di ritorno
La funzione digitalWrite(11,HIGH) è corretta?
Correct!Wrong!
La funzione analogWrite(11,1023) è corretta?
Correct!Wrong!
Il valore massimo di tensione per la funzione digitalWrite è pari a 255
Arduino e i 6 PIN Digitali Segreti
Obiettivo: Scoprire ed utilizzare i 6 pin digitali segreti di Arduino nel proprio progetto.
Arduino Porte (Input, Output, Digitali, Analogici)
Teoria:
Uno dei problemi più comunemente incontrati dagli sviluppatori è quello di finire i pin digitali necessari per collegare Arduino ad eventuali periferiche (sensori/attuatori). I pin digitali sono 14 e potrebbero bastare pochi elementi per terminarli (e.g., display, led, pulsanti, keypad). E’ importante inoltre considerare che i pin 0 ed 1 sono utilizzati per la comunicazione seriale pertanto ne è sconsigliato l’utilizzo. Pertanto, le soluzioni alla carenza di pin digitali in un progetto che richieda più 14 pin sono:
Utilizzare una scheda più efficace come Arduino Mega
Utilizzare dei componenti elettronici aggiuntivi tipo buffer o registri
Utilizzare i 6 Pin Digitali Segreti (SOLUZIONE PROPOSTA)
Nello specifico è possibile utilizzare i 6 pin di input analogici (quelli che si trovano in basso a destra nella scheda) come pin di input/output digitali. Pertanto i PIN di input/output sono in tutto 20 e non 14 come sempre pensato. Utilizzare i pin di input analogici come pin di input/output digitale è particolarmente semplice basta semplicemente indicare nell’istruzione pinmode il numero corretto definito nella seguente tabella:
Input Analogico
Input/Output Digitale
A0
14
A1
15
A2
16
A3
17
A4
18
A5
19
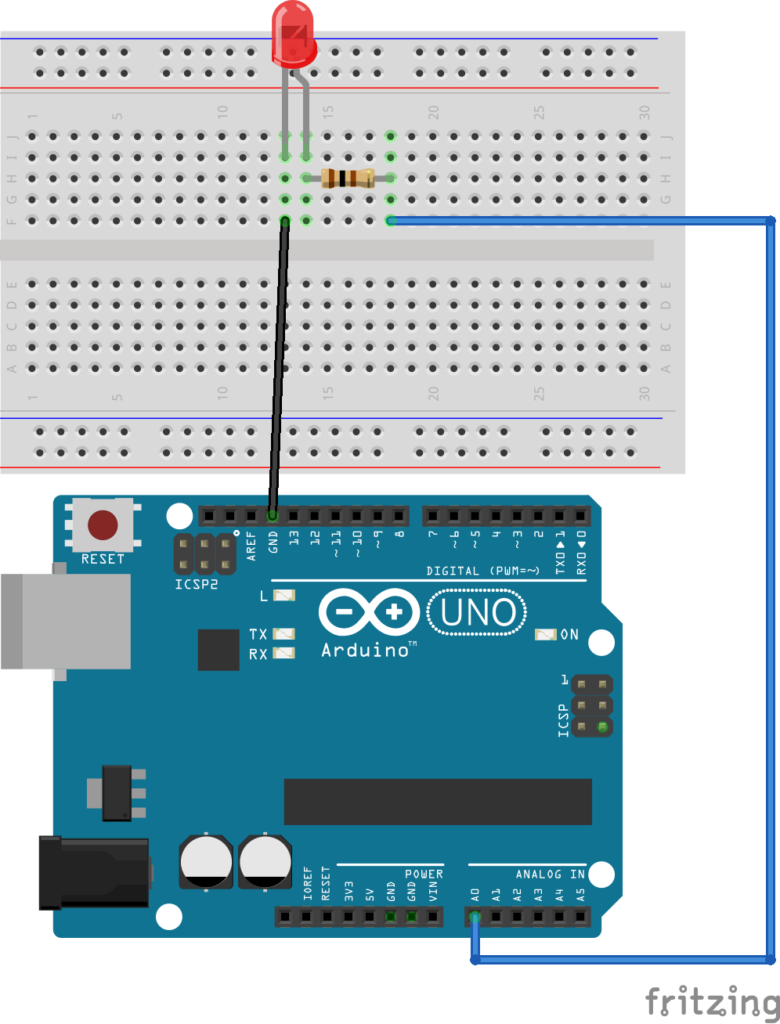
Collegamento Circuitale:
Collegamento Circuitale
Codice: Viene in seguito riportato il codice necessario per accendere spegnere un led utilizzando il pin segreto 14.